Author: Denis Avetisyan
Researchers have developed a comprehensive finite element analysis approach to accurately simulate the behavior of interconnected systems undergoing large deformations.

This work details the kinematics and dynamics theories behind a Total Lagrangian Finite Element Analysis framework for modeling finite deformation multibody systems with contact, viscoelasticity, and kinematic constraints.
Accurately modeling the complex interplay of large deformations, contact, and kinematic constraints in multi-body systems remains a significant challenge in dynamics simulations. This work details a comprehensive Total Lagrangian finite element analysis framework, as presented in ‘The Kinematics and Dynamics Theories of a Total Lagrangian Finite Element Analysis Framework for Finite Deformation Multibody Dynamics’, to address these challenges. By systematically formulating governing equations for ANCF beam, shell, and tetrahedral elements-incorporating hyperelastic material models and a finite-strain Kelvin-Voigt damping model-we demonstrate a robust approach to simulating the dynamic behavior of interconnected deformable bodies. Will this framework enable more accurate and efficient simulations of complex systems ranging from robotics to biomechanics?
The Inevitable Complexity of Solid Form
The reliable prediction of how solid objects change shape under stress – a process known as deformation modeling – underpins a vast range of engineering disciplines, from automotive crash safety and aerospace design to biomedical device development and manufacturing processes. However, achieving accurate simulations is profoundly challenging. The complexity arises from the intricate interplay of material properties, geometric features, and applied forces, often necessitating computationally intensive methods to resolve the nonlinear equations governing solid mechanics. These simulations must account for phenomena like plasticity, elasticity, and potential failure modes, demanding significant processing power and sophisticated algorithms to deliver results within a reasonable timeframe. Consequently, advancements in deformation modeling are crucial not only for improving the performance and safety of engineered systems but also for enabling innovation in fields where physical prototyping is expensive, time-consuming, or simply impractical.
The predictive power of engineering simulations hinges on accurately representing how solid objects change shape under stress, but traditional finite element methods encounter significant hurdles when dealing with substantial deformations and interactions between surfaces. As an object undergoes large displacements-bending, twisting, or stretching significantly-the standard formulation of these methods can become unstable or produce inaccurate results. Similarly, modeling contact-where surfaces collide and separate-introduces nonlinearities and complexities that strain computational resources and require specialized algorithms to prevent unrealistic interpenetration or loss of contact. Consequently, researchers are continually developing more robust and efficient formulations-such as updated Lagrangian methods, arc-length controls, and advanced contact detection strategies-to overcome these limitations and enable reliable simulation of real-world scenarios involving large deformations and complex contact.
The fidelity of computational simulations hinges on the ability to model material behavior accurately, yet current methods frequently encounter limitations when faced with nonlinearity and geometric complexity. Simulating materials that undergo significant, permanent changes – such as those experiencing plasticity or hyperelasticity – demands substantially more computational power than linear elastic analyses. Furthermore, intricate geometries – those with fine details, sharp corners, or complex internal structures – exacerbate these demands, often requiring exceedingly fine meshes to capture the stress and strain distributions effectively. This often forces engineers to choose between computational feasibility and solution accuracy, leading to compromises that can impact the reliability of predicted results. The pursuit of robust and efficient deformation modeling techniques remains a central challenge in computational mechanics, driving research into advanced algorithms and numerical methods designed to overcome these inherent limitations.

Anchoring to the Undeformed: A Necessary Illusion
The Total Lagrangian formulation addresses large deformation analysis by defining all material properties and geometric calculations with respect to the initial, undeformed configuration. This approach avoids the complexities of updating material tensors and geometric parameters throughout the deformation process, as all quantities are expressed relative to the known, initial state. Consequently, the formulation simplifies the derivation of element stiffness matrices and facilitates the accurate tracking of material behavior under significant distortions. By maintaining a fixed reference frame, the Total Lagrangian method ensures solution stability and reduces numerical error in scenarios involving substantial changes in geometry, such as those encountered in structural mechanics and fluid-structure interaction problems.
The Assumed Strain formulation improves the accuracy and computational efficiency of the ANCF element by directly incorporating a predefined kinematic field – typically linear or quadratic displacement functions – into the element’s displacement approximation. This approach bypasses the need for iterative solution schemes to satisfy compatibility conditions, reducing computational cost, particularly in scenarios involving complex deformations. By assuming a specific strain field, the formulation reduces the number of independent degrees of freedom required to represent the deformation, further enhancing efficiency without significant loss of accuracy, especially when modeling elements with relatively simple deformation characteristics. The predefined strain field is typically derived from engineering beam or plate theory, aligning the element’s behavior with established structural mechanics principles.
The integration of the Total Lagrangian formulation with the Assumed Strain formulation within the ANCF (Absolute Nodal Coordinate Formulation) element yields a finite element framework distinguished by its ability to accurately model geometrically nonlinear problems involving beams, shells, and solid structures. This approach avoids the complexities of updating material tensors during large deformations by referencing all calculations to the original, undeformed configuration. The assumed strain field, incorporated directly into the element formulation, further improves accuracy and computational efficiency, particularly in scenarios with significant bending or shear deformation. Consequently, the combined framework demonstrates robustness and versatility across a range of complex structural mechanics applications, providing high-precision results even with substantial material and geometric nonlinearities.
Material Truths and the Illusion of Contact
The simulation framework employs advanced material models to represent material behavior beyond the elastic limits of the Saint-Venant-Kirchhoff model, which assumes linear elasticity. Specifically, the Mooney-Rivlin model is utilized, a hyperelastic model capable of simulating large deformations and nonlinear stress-strain relationships common in materials like rubber and elastomers. This model defines strain energy as a function of invariants of the Cauchy-Green deformation tensors, allowing for accurate representation of materials experiencing significant geometric changes. The use of hyperelastic models is crucial for scenarios involving substantial stretching, compression, or bending, where linear elastic models would produce inaccurate and unrealistic results.
The simulation framework employs the Hertzian contact law to calculate normal contact forces based on the deformation of contacting surfaces, assuming elastic behavior and proportional contact area. To model more complex contact scenarios, the Mindlin history model is integrated, extending the Hertzian approach to include tangential forces arising from friction and adhesion. This model accounts for the history of relative sliding between surfaces, enabling the accurate simulation of stick-slip phenomena and realistic frictional behavior. Combined, these models capture both the initial normal impact and the subsequent frictional interactions, providing a comprehensive representation of contact mechanics, and are essential for simulating interactions involving complex geometries and materials.
Kelvin-Voigt damping is integrated into the simulation framework to introduce energy dissipation, enhancing both the stability and robustness of dynamic simulations. This damping model functions by combining a spring element with a dashpot, representing elastic and viscous behavior, respectively. The tangential damping coefficient, \gamma_t, is quantified as \gamma_t = -2\sqrt{5/6}\beta\sqrt{m_{eff}k_t}, where β represents the damping ratio, m_{eff} is the effective mass, and k_t denotes the tangential stiffness. This quantifiable damping allows for precise control over energy dissipation rates, preventing oscillations and ensuring simulations remain stable even with complex interactions and high velocities.
A Toolkit for Inevitable Approximation
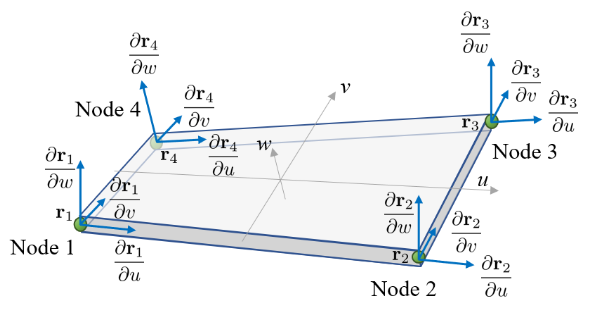
The computational formulation demonstrates broad applicability through implementation across a variety of finite element types, notably including both the 2-node ANCF 3243 beam element and the 4-node ANCF 3443 shell element. This design choice allows engineers to model structures exhibiting slender, beam-like behavior as well as those characterized by thin, curved surfaces within a unified framework. By leveraging the geometrically exact ANCF (Absolute Nodal Coordinate Formulation), these elements accurately capture large deformations and rotations, crucial for simulations involving significant structural response. The consistent application of this formulation across different element types simplifies model creation and ensures reliable results regardless of the structural component being analyzed, thereby increasing the overall versatility of the simulation toolkit.
The implementation of a 10-node tetrahedron element significantly broadens the modeling capabilities of this framework, extending its reach into complex solid mechanics problems. This element, characterized by its ten nodal points, facilitates a more nuanced representation of displacement fields within three-dimensional solid bodies, thereby enhancing the accuracy of simulations involving intricate geometries and material behaviors. Consequently, engineers can now effectively analyze a wider array of structural components – from automotive parts and aerospace assemblies to biomedical implants and consumer products – with a single, cohesive computational approach. The inclusion of tetrahedral elements provides a versatile tool for discretizing complex solid domains, enabling detailed stress analysis, deformation prediction, and failure assessment across diverse engineering disciplines.
The formulation’s inherent modularity facilitates highly tailored computational solutions, moving beyond a one-size-fits-all approach to structural analysis. By allowing engineers to select and combine different element types – from beams and shells to solid tetrahedra – the framework optimizes both computational efficiency and the overall accuracy of a simulation. This flexibility extends to time integration schemes; the design readily accommodates implicit methods, which, unlike explicit methods, enable the use of significantly larger time steps. This capability is crucial for simulating long-duration events or systems with rapidly changing dynamics, substantially reducing computation time and resource demands without compromising solution fidelity.

The pursuit of a Total Lagrangian finite element analysis framework, as detailed within, isn’t about imposing order, but about acknowledging the inherent uncertainty within complex systems. It’s a process of observing how forces propagate, constraints interact, and viscoelasticity introduces dissipation – a controlled yielding to the inevitable. As Carl Friedrich Gauss observed, “I prefer a beautiful hypothesis to a clumsy solution.” This sentiment echoes the elegance sought in the framework; not a rigid attempt to solve dynamics, but to create a model that reveals its inherent behavior. Monitoring, in this context, becomes the art of fearing consciously – anticipating where the model, and the physical system it represents, might diverge from expectation, not as failure, but as revelation.
What Lies Ahead?
The pursuit of comprehensive frameworks for multibody dynamics, as exemplified by this work, invariably reveals the limits of completeness. Each inclusion – contact mechanics, viscoelasticity, intricate kinematic constraints – is not a solution, but a deferral of complexity. The framework expands, yet the underlying ecosystem of interactions grows more tangled, more prone to unforeseen resonances. It is a familiar pattern; architecture isn’t structure – it’s a compromise frozen in time.
Future efforts will not likely reside in the refinement of monolithic formulations. Instead, attention may turn toward modularity, toward accepting a degree of deliberate incompleteness. The ability to seamlessly integrate specialized solvers – each optimized for a specific facet of the problem – will prove more valuable than attempting to encapsulate all phenomena within a single, all-encompassing structure. Technologies change, dependencies remain.
Ultimately, the true challenge isn’t simulating fidelity, but managing uncertainty. The system, by its very nature, will always exceed the model. The question, then, isn’t whether the simulation is ‘correct’, but whether it reveals the character of its inevitable deviations. The work, in that sense, is less about prediction, and more about cultivating a mindful acceptance of the unpredictable.
Original article: https://arxiv.org/pdf/2602.17002.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Gold Rate Forecast
- Adam Levine Looks So Different After Shaving His Beard Off
- Steam Makes Sci-Fi Game 100% Free for 72 Hours
- Tekken 8 Fans Furious as Tifa Tipped for Street Fighter 6 Instead
- 10 Movies That Were Banned in Different Countries For Random Reasons
- Nintendo Switch 2 Reportedly Getting Remake of One of the Best PS3 and Xbox 360 Games
- Welcome to Demon School! Iruma-kun season 4 release schedule: When are new episodes on Crunchyroll?
- Dialoop coming to Switch on June 17
- When Things Fall Apart: A New View of Phase Transitions
- See Kaia Gerber & Lewis Pullman’s Vanity Fair Oscars Party Date Night
2026-02-23 05:03